
[ad_1]
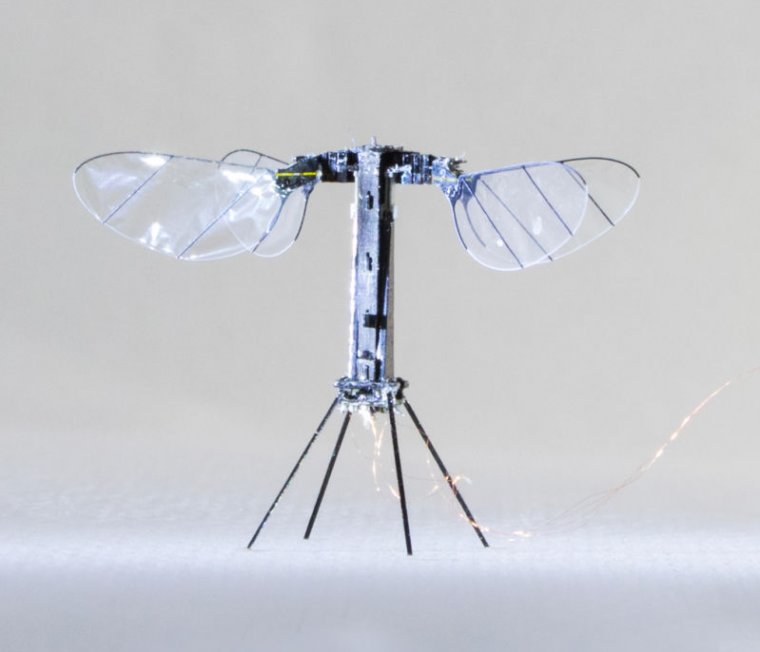
Enlarge / The RoboBee XWing without its power and electronics. (credit: Noah T. Jafferis and E. Farrell Helbling, Harvard Microrobotics Laboratory)
{kind=link}
Just over six years ago, when researchers at Harvard announced that they had made tiny flying robots, they immediately began talking about the prospect of their tiny creations operating autonomously in complicated environments. That seemed wildly optimistic, given that the robots flew by trailing a set of copper wires that brought power and control instructions; the robots were guided by a computer that monitored their positions using a camera.
Since then, however, the team has continued working on refining the tiny machines, giving them enhanced landing capabilities, for example. And today, the team is announcing the first demonstration of self-powered flight. The flight is very short and isn’t self-controlled, but the tiny craft manages to carry both the power supply circuitry and its own power source.
A matter of miniaturization
There are two approaches to miniaturization, which you can think of as top-down and bottom-up. From the top-down side, companies are shrinking components and cutting weight to allow ever smaller versions of quadcopter drones to fly, with some now available that weigh as little as 10 grams. But this type of hardware faces some hard physical limits that are going to limit how much it could shrink. Batteries, for example, end up with more of their mass going to packaging and support hardware rather than charge storage. And friction begins to play a dominant role in the performance of the standard rotating motors.
Read 12 remaining paragraphs | Comments
[ad_2]
Source link
Related Posts
- What to know about measles in the US as case count breaks record
- NASA to perform key test of the SLS rocket, necessitating a delay in its launch
- Fiber-guided atoms preserve quantum states—clocks, sensors to come
- Trump administration puts offshore drilling expansion in Arctic, Atlantic on ice
- The antibiotics industry is broken—but there’s a fix